Mehr Infos: http://www.ixdaberlin.collectivex.com/calendar/event/2009/4/8/99166
Wenn ihr Lust habt, ein paar kleine Projekte live zu sehen oder einfach nur ein Bier mit uns trinken gehen wollt, dann fühlt euch herzlich eingeladen.
Beste Grüße Marcus
Update: Hier kommt noch die Adresse
newthinking store GmbH
Tucholskystrasse 48
10117 Berlin
Es geht um 19 Uhr los :)
]]> Neben den JEP-Shields bietet auch das TinkerKit einen sehr modularen Ansatz, um sich das Leben im Physical-Computing zu erleichtern.
Neben den JEP-Shields bietet auch das TinkerKit einen sehr modularen Ansatz, um sich das Leben im Physical-Computing zu erleichtern.
Dabei setzt man ein Shield auf das Arduino-Board und kann alle möglichen Eingabe- und Ausgabe-Module daran anschließen.
Link: Tinkerkit.com
Via: Make
Peter Bennett spricht über sein Projekt und zeigt, wie es funktioniert. Es handelt sich um einen taktilen Sequencer, der gesteuert wird, indem man Metallkugeln auf einem Raster plaziert.
Via: MAKE
]]>Start mit Arduino – Blink 1/2
Start mit Arduino – Blink 2/2
Links zum Tutorial:
Fritzing.org
Arduino.cc
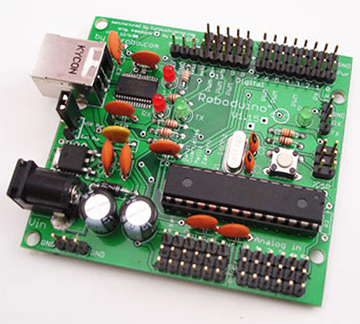 Roboduino ist ein Arduino-Board, dass speziell darauf ausgelegt ist, multiple Servomotoren anzusteuern. Servos können direkt auf das Board gesteckt und betrieben werden.
Roboduino ist ein Arduino-Board, dass speziell darauf ausgelegt ist, multiple Servomotoren anzusteuern. Servos können direkt auf das Board gesteckt und betrieben werden.
Auf der Websites gibt es die Eagle-Files zum selber bauen, aber auch ein DIY Kit und ein fertiges Modul, dass man bestellen kann.
]]> Ein sehr schönes Tutorial von Ladyada zeigt ausführlich, wie man ein LCD-Display mit einem Arduino-Board verbinden kann.
Ein sehr schönes Tutorial von Ladyada zeigt ausführlich, wie man ein LCD-Display mit einem Arduino-Board verbinden kann.
Link: Ladyada LCD to Arduino
Via: Makezine

(Dieses Shield befindet sich noch in der Erprobungsphase.)
Mögliche Einsatzgebiete:
Displays
Outputs:
8x Outputkanäle
Inputs:
3x Input analog oder digital verwendbar
Extras:
Anschluss Logik Spannungsausgangs (5V und GND)
Schift IN und Shift Out Buchse
Servo-Anschluss
Dateien:
JEP Shift Out v0.6 Eagle-Datei
JEP Shift Out vo.6 Kupferbahnen (pdf)
JEP Shift Out Oberseite (pdf)
Bestückungsplan:
IC1: ULN2803A
IC2: 74HC595
C1: 0,1 uF
RAN1: 100 Ohm
Potis (R6–R8): 100kOhm (Bauform: PT6KV)
1x Federleiste 32 Pins 4,2 mm Höhe, enge Kontakte
1x Stiftleiste 90 Grad 3 Pins für Servoanschluss
1x Stiftleiste 2 Pins für Jumper
1x Jumper
7x Printklemme 2pol RM 3,5
2x Printklemme 3pol RM 3,5
Stack Through Pinheader von www.samtec.com:
2x SSW-106-04-F-S
2x SSW-108-04-F-S
Demnächst im FRITZING-SHOP als Set erhältlich.
]]>
Mögliche Einsatzgebiete:
Hacks, Motoren, Glühbirnen, LEDs
Outputs:
2x Relais
Inputs:
3x Input analog oder digital verwendbar
Extras:
Anschluss Logik Spannungsausgangs (5V und GND)
Servo-Anschluss
Dateien:
JEP Relais v0.6 Eagle-Datei
JEP Relais vo.6 Kupferbahnen (pdf)
JEP Relais Oberseite (pdf)
Bestückungsplan:
2x Relais: FRS-1B
D1,D2: 1N4007
T1,T2: BC546 NPN
R1,R2: 220 Ohm
R3,R4: 1kOhm
R5: 100 Ohm
Potis (R6–R8): 100kOhm (Bauform: PT6KV)
1x Federleiste 32 Pins 4,2 mm Höhe, enge Kontakte
1x Stiftleiste 90 Grad 3 Pins für Servoanschluss
1x Printklemme 2pol RM 3,5
4x Printklemme 3pol RM 3,5
Stack Through Pinheader von www.samtec.com:
2x SSW-106-04-F-S
2x SSW-108-04-F-S
Demnächst im FRITZING-SHOP als Set erhältlich.
]]>
Mögliche Einsatzgebiete:
kleine Getriebemotoren
Vibrationsmotoren
Steppermotoren
Outputs:
4x Motortreiber
Inputs:
3x Input analog oder digital verwendbar
Specs:
5 – 12 V über Arduino
0,5 Ampere pro Kanal
1 Ampere gesamt über Vin von Arduino
Extras:
Jumper für 5V oder Vin
Anschluss Logik Spannungsausgangs (5V und GND)
Anschluss für externe Spannungsversorgung
Servo-Anschluss
Dateien:
JEP Quadro v0.6 Eagle-Datei
JEP Quadro vo.6 Kupferbahnen (pdf)
JEP Quadro Oberseite (pdf)
Bestückungsplan:
RAN1: 100 Ohm
IC1, IC2: L293D
Potis (R2–R4): 100kOhm (Bauform: PT6KV)
1x Federleiste 32 Pins 4,2 mm Höhe, enge Kontakte
1x Stiftleiste 90 Grad 3 Pins für Servoanschluss
1x Stiftleiste 3 Pins für Spannungsselektor
1x Jumper
6x Printklemme 2pol RM 3,5
2x Printklemme 3pol RM 3,5
Stack Through Pinheader von www.samtec.com:
2x SSW-106-04-F-S
2x SSW-108-04-F-S
Optional: IC Kühlkörper
Demnächst im FRITZING-SHOP als Set erhältlich.
]]>